AI Computer
AI Computer  Phụ kiện cho Pi
Phụ kiện cho Pi  Module cho Raspberry Pi
Module cho Raspberry Pi Bài 1 : Lập trình cơ bản Raspberry Pi với GPIO
18:14 - 14/01/2019
Bài 1 : Lập trình cơ bản Raspberry Pi với GPIO
Remote Desktop Raspberry Pi không cần Wifi, mạng LAN và IP
Camera nhiệt giải pháp tuyệt vời cho mùa Covid-19
Lập trình cơ bản với OpenPLC trên Raspberry Pi
Hướng dẫn cài đặt OpenPLC trên Raspberry Pi
Khi chúng ta bắt tay làm quen với một dòng vi xử lý mới nào đó, chúng ta luôn cần chuẩn bị những thông tin và kiến thức cần thiết trước khi bắt đầu.
Đầu tiên là thông tin về phần cứng: dòng vi xử lý, tốc độ của nó, dung lượng của Ram, dương lượng bộ nhớ cứng (bộ nhớ để ghi chương trình) số lượng và vị trí của GPIO, hay các chuẩn giao tiếp được hỗ trợ.
Tiếp đó là kiến thức về lập trình cho vi xử lý. Ví như asembly – ngôn ngữ cấp thấp, ngôn ngữ C – hầu hết được hỗ trợ trên các công cụ lập trình, python – công cụ trên dòng vi xử lý chạy hệ điều hành, hay bất cứ ngôn ngữ nào mà công cụ cho vị xử lý đó hỗ trợ.
1. Kiến thức phần cứng
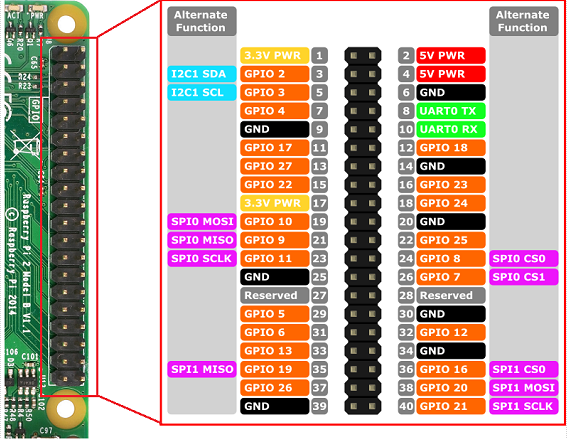
Trước hết hãy cùng xem GPIO mapping của Raspberry Pi. Đây là sơ đồ trên Raspberry 2 Model B
Trong 40 chân GPIO bao gồm : - 26 chân GPIO. Khi thiết lập là input, GPIO có thể được sử dụng như chân interupt, GPIO 14 & 15 được thiết lập sẵn là chân input. - 1UART, 1 I2C, 2 SPI, 1 PWM (GPIO 4) - 2 chân nguồn 5V, 2 chân nguồn 3.3V, 8 chân GND - 2 chân ID EEPROM Vi xử lý ARMv7 32bit quad core 900Mhz, dung lượng Ram 1G, và bộ nhớ kiểu micro SD dung lượng tùy chọn ( nên >=4G). Khi một chân GPIO lên mức cao sẽ đạt điện áp 3.3V, dòng ra tối đa Imax = 5mA. Kiến thức cơ bản cho Pi như trên là đủ để có thể bắt đầu lập trình. Chúng ta cùng chuyển qua phần kiến thức tiếp theo.
|
|
2. Kiến thức về ngôn ngữ lập trình
Lập trình trên Pi có nhiều sự lựa chọn. Có thể lập trình trực tiếp từ bash-shell của linux, hoặc lập trình với C đơn thuần, ngoài ra còn có python, perl hay Ruby (bạn có thể xem các code mẫu ở đây) . Bạn nên chọn lựa một bộ thư viện thay vì chỉ lập trình với ngôn ngữ đơn thuần, vì đơn giản bạn đặt gạch xây nhà nhanh hơn là làm từng viên gạch cho ngôi nhà của mình. Thư viện sẽ giúp bạn bỏ qua lượng công việc vừa phức tạp và tốn công sức như gán địa chỉ của chân GPIO hay làm việc với thanh ghi ..v.v. Bạn có thể tập trung hơn vào xây dựng ứng dụng của mình.
Thư viện cho Pi cũng đa dạng không kém. Một thư viện tốt khi nó cung cấp nhiều hàm xử lý linh hoạt, hỗ trợ nhiều giao tiếp và tốc độ của thư viện nhanh ( tức là nó mất không quá nhiều lần gọi lệnh hay hàm trung gian để có thực hiện mong muốn của bạn ). Vấn đề tốc độ chỉ đáng quan tâm khi bạn thực sự làm việc với yêu cầu vi xử lý thực hiện lệnh nhanh chóng (giả như PWM). Bạn có thể xem qua Benchmarking cho các thư việc của Raspberry Pi.
Trong bài này, mình sẽ giới thiệu lập trình trên 2 ngôn ngữ được sử dụng rộng rãi trên Pi là C và Python. Hai bộ thư viện tương ứng là WiringPi và RPiGPIO. WiringPi được viết dưới dạng framework của wiring, nó cũng là framework mà Arduino sử dụng.
3. Bắt đầu với bài lập trình GPIO
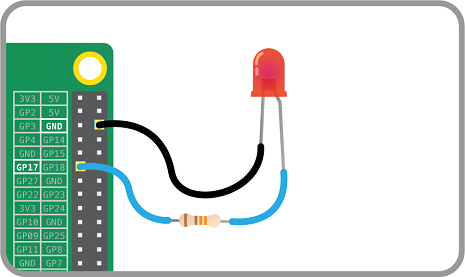
Để bắt đầu với chuỗi bài lập trình cho Raspberry Pi. Chúng ta hãy cùng bắt đầu với những bài căn bản nhất mà có lẽ hơi buồn tẻ của lập trình – lập trình cho GPIO. Những bài dưới đây sẽ lập trình để điều khiển LED. Bạn hãy chuẩn bị phần cứng nhưng sơ đồ dưới đây.
Nhiệm vụ của chúng ta sẽ điều khiển bật tắt chiếc đèn led này.Lưu ý rằng, khi GPIO của Pi được thiết lập lên mức cao thì hiệu điện thế U = 3.3V và dòng tối đa là Imax = 50mA . Giả sử bóng đèn Led thường dùng sáng ở 2V và I = 5m thì điện trở phù hợp sẽ được tính là : R=(3.3 - 2)/0.005 = 260 Ω Bạn có thể chọn điện trở quen thuộc hơn như 220 Ω ,270 Ω hay 330 Ω. Sau khi hoàn thành thiết kế phần cứng, chúng ta hãy bắt tay ngay vào lập trình. |
|
a) Lập trình với ngôn ngữ C
Các bạn cần cài đặt thư viện wringpi trước khi lập trình. Có thể tải thư viện và xem hướng dẫn cài đặt tại Wiringpi-project.
Bài 1: lập trình bật tắt LED
#include <wiringPi.h>
int main(void)
{
wiringPiSetupGpio();
pinMode(17, OUTPUT);
while(1){
digitalWrite(17, HIGH);
}
return 0;
1. Thêm thư viện Wiringpi : #include<wiringPi.h>
2. Thiết lập chọn kiểu đánh số chân GPIO
wiringPiSetupGpio();
Wiringpi có 4 kiểu chọn đánh số chân.
- wiringPiSetup() : thiết lập đánh số theo cách riêng của Pi
- wiringPiSetupGpio() : đánh số theo Broadcom GPIO – tương ứng với chân của hình 1.
- wiringPiSetupPhys() : đánh số theo chân header trên board.
- wiringPiSetupSys() : đánh số theo system class GPIO.
Để tiện sử dụng. Tất cả các chương trình chúng ta sẽ sử dụng cách đánh số thứ 2.
3. Chọn và thiết lập Output chân LED
pinMode(pin, OUTPUT);
//pinMode(pin, INPUT);
4. Bật-tắt LED (2 kiểu)
digitalWrite(17, 1); //digitalWrite(17, HIGH);
digitalWrite(17, 0); //digitalWrite(17, LOW);
5. Thực hiện build chương trình trên terminal
gcc -Wall -o blink blink.c -lwiringPi
sudo ./blink
Các bạn có thể sẽ ngạc nhiên khi kết thúc chương trình mà led vẫn sáng vì trạng thái thiết lập hiện tại của chương trình không bị thay đổi. Mình trình bày phần này kỹ hơn ở mục cuối của bài.
Bài 2 : Nhấp nháy LED
#include <wiringPi.h>
int main(void)
{
wiringPiSetupGpio();
pinMode(17, OUTPUT);
while(1)
{
digitalWrite(17, HIGH);
delay(1000);
digitalWrite(17, LOW);
delay(1000);
}
return 0;
}
Bài 3 : Điều khiển LED bằng button
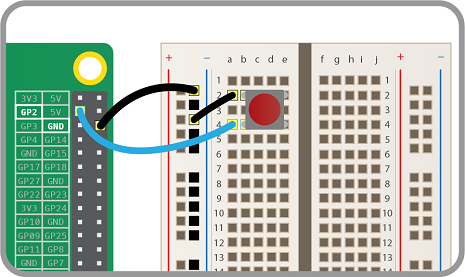
Chương trình thực hiện yêu cầu đơn giản, khi bạn nhất button thì đèn sẽ sáng. Chuẩn bị sơ đồ phần cứng như sau.
Khi button được nhấn thì trạng thái trên GPIO-2 sẽ xuống mức thấp. Lưu ý rằng, khi set chân GPIO làm input thì trạng thái của GPIO sẽ lơ lửng (float) lúc cao, lúc thấp không xác định. Để xác định mức rõ ràng cần dùng điện trở để kéo GPIO lên mức cao hoặc kéo xuống thấp. Ở đây, sử dụng điện trở trong của GPIO để kéo lên mức cao (R=10kΩ). |
|
#include <wiringPi.h>
int main(void)
{
wiringPiSetupGpio();
pinMode(17, OUTPUT);
pinMode(2, INPUT);
pullUpDnControl (2, PUD_UP);
digitalWrite(17, 0);
while(1)
{
if(!digitalRead(2)){
digitalWrite(17, 1);
// digitalWrite(17, !digitalRead(17));
delay(300);
}
}
return 0;
}
Thiết lập input cho chân button
pinMode(pin, INPUT);
- Đọc tín hiệu từ button
pullUpDnControl (pin, PUD_UP);
digitalRead(pin);
Kéo điện trở pin lên cao và đọc tín hiệu từ button.
- Để thực hiện ấn button để bật và tắt LED, các bạn hãy sửa dòng code này
//digitalWrite(17, 1);
digitalWrite(17, !digitalRead(17));
Nó sẽ đọc giá trị trên chân GPIO rồi thiết lập giá trị đảo ngược cho chân GPIO đó. (dù chúng ta không set chân đó là input).
b) Lập trình với ngôn ngữ Python
Phần này chỉ dành cho những bạn có kiến thức cơ bản về Python, tuy nhiên vì Python được coi là ngôn ngữ cho người mới bắt đầu, rất dễ học nên các bạn có thể nhanh chóng xem qua Python cơ bản và bắt đầu lập trình với phần này.
Thư viện Rpi.GPIO được nhúng sẵn trên hệ điều hảnh Raspbian nên bạn có thể sử dụng luôn. Thư viện GPIO hỗ trợ thiết lập input/output cho GPIO và PWM software.
Lưu ý : Python tuân thủ nghiêm ngặt khoảng cách tương ứng giữa các câu lệnh. Những câu lệnh trong cùng một khối thì phải có khoảng cách bằng nhau. Nếu bạn copy đoạn code dưới đây thì có thể sẽ bị lối sai khoảng cách (space error), các bạn nên sửa lại cho đúng.
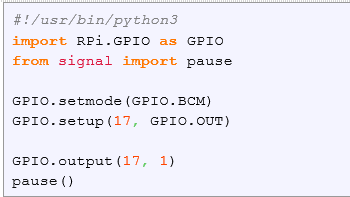
Bài 1 : Bật tắt LED
#!/usr/bin/python3
import RPi.GPIO as GPIO
GPIO.setmode(GPIO.BCM)
GPIO.setup(17, GPIO.OUT)
GPIO.output(17, 1)
1. Từ giao diện màn hình chính chọn main > Programming > Python3 (IDLE).
2. Lựa chọn tạo new file và save file đó với tên “led.py”
3. Bước đầu tiên là import thư viện của GPIOzero
import RPi.GPIO as GPIO
4. Chọn và thiết lập output chân LED
GPIO.setmode(GPIO.BCM)
GPIO.setup(pin, GPIO.OUT)
Thư viện Rpi.GPIO hỗ trợ 2 kiểu đánh số GPPIO là BCM và Board number bạn cần chọn kiểu để thư viện có thể hiểu bạn đang dùng theo kiểu nào.
Thiết lập chân số 17 là output
5. Bật – tắt LED (có 3 kiểu thiết lập)
GPIO.output(pin, 1)
# GPIO.output(pin, True)
# GPIO.output(pin, GPIO.HIGH)
GPIO.output(pin, 0)
# GPIO.output(pin, False)
# GPIO.output(pin, GPIO.LOW)
6. Lưu file lại Ctrl+S, sau đó chạy code nhấn F5. Để kết thúc bạn nhấn Ctrl + C
Cũng giống như bài lập trình với C. Trạng thái của chương trình trên GPIO vẫn còn được lưu giữ.
Ngoài ra bạn có thể chạy file led.py từ terminal
1. Trước khi chạy bạn cần khai báo thêm “shebang line” - vị trí của trình biên dịch . Ở đây là python3 (phiên bản 3).
#!/usr/bin/python3
Dòng code này được đặt ở dòng đầu tiên của file. Ở ví dụ trên bạn không cần khai báo thêm vì ban đang sử dụng Python3 IDLE nên nó biết được luôn trình biên dịch của bạn.
2. Bạn mở terminal lên từ màn hình chính hoặc nhấn Ctrl + Shift + T
3. Gõ lệnh chuyển vị trí hiện tại của terminal tới thư mục led.py và thực hiện các lệnh để chạy trương trình
Lệnh thứ 2 để chuyển file đó thành file có thể chạy như file thực thi. Lệnh cuối để thực hiện chương trình. Để kết thúc bạn cũng ấn Ctrl + C
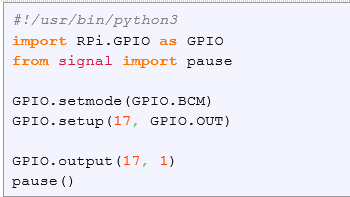
Tuy nhiên bạn sẽ chỉ thấy chương trình hiện lên rồi tắt đi ngay. Lí do là chương trình python chỉ đọc từ đầu tới cuối và kết thúc luôn. Muốn chương trình có thể tiếp tục bạn có thể đặt vòng lặp bên ngoài hoặc đặt thiết lập pause() ở cuối chương trình.

Hoặc
Bài 2 : Nhấp nháy LED
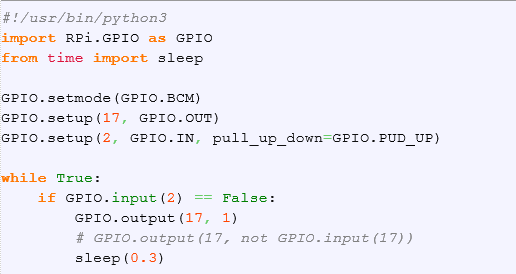
Bài 3: Điều khiển LED bằng button
4. Giải phóng GPIO
Như đã biết ở trên, để kết thúc chương trình các bạn có thể nhấn Ctrl+C. Đó là keyboard interupt, chương trình sẽ bị break và dừng chương trình. Nhưng nếu bạn chú ý, trạng thái của chương trình vẫn còn được giữ nguyên sau khi break, ví dụ như trước khi bị break chân GPIO được set lên mức cao thì nó vẫn còn giữ nguyên mức cao đó sau khi bị break. Sẽ chẳng ảnh hưởng gì nếu bạn thực hiện chạy tiếp một chương trình mà không lo tới GPIO đó, nhưng sẽ có vấn đề nếu Pi vẫn đang kết nối với phần cứng bên ngoài, nghĩa là nó vẫn có thể tác động lên phần cứng đó mà bạn không mong muốn (ví dụ đèn sẽ vẫn sáng trong chương trình điều khiển led).
Nếu chạy lại file trên một lần nữa sẽ có thông báo warning hiện ra :
"RuntimeWarning: This channel is already in use, continuing anyway. Use GPIO.setwarning(False) to disable warnings."
Thông báo này có nghĩa là chân PGIO đó đang được sử dụng. Các bạn có thể bỏ qua vì chương trình vẫn sẽ tiếp tục chạy, hoặc ẩn nó đi bằng cách dùng một dòng lệnh GPIO.setwarning(False) . Nhưng warning này khiến cho chương trình của bạn trở nên “out of control”. Đó là điều không thể chấp nhận với lập trình viên.
Chúng ta nên khắc phục bằng cách giải phóng toàn bộ GPIO (hoặc một phần được sử dụng) ngay sau khi phát hiện interrupt. Nhưng trước hết hãy cùng nâng cấp chương trình lên mức mới để có thể lập trình chuyên nghiệp hơn.
Chương trình C bắt sự kiện "Ctr+C"
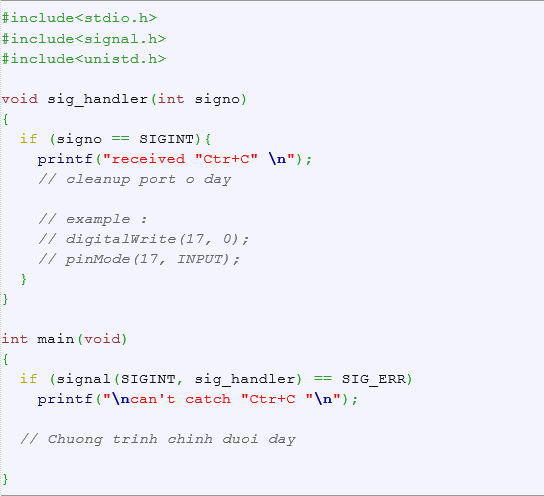
Thư viện C chưa hỗ trợ hàm chuyên dụng để bạn có thể sử dụng, nên bạn phải xử lý bằng tay từng GPIO hay PORT. Hãy chú ý phần example trong hàm bắt interrupt trên. Hàm này sẽ chay độc lập với hàm main. Còn những sự kiên interrupt khác các bạn có thể tham khảo thêm ở một bài viết khá hữu ích ở đây
Chương trình Python bắt sự kiện "CTR+C"
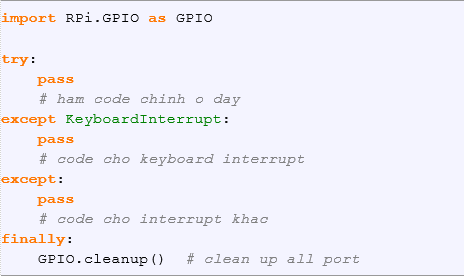
Chương trình chính bây giờ sẽ được đặt dưới hàm “try”. Khi bạn nhấn Ctrl+C tức là keyboard inturrupt, chương trình sẽ ngay lập tức nhảy sang vùng code cho keyboard interrupt, nếu là interrupt loại khác thì chương trình sẽ nhảy sang vùng code cho interrupt loại khác, và sau khi thực hiện chương trình cho interrupt chương trình sẽ nhảy tới vùng code kết thúc chương trình. Hàm GPIO.cleanup() có thể thay bạn xử lý toàn bộ các port.
Trong vùng code kết thúc chương trình nhất định phải có câu lệnh GPIO.cleanup(). Nó sẽ giúp giải phóng tất cả các GPIO đang được sử dụng, như vậy trạng thái cũ của chương trình sẽ được xóa bỏ hoàn toàn.
Để cập nhật các tin tức công nghệ mới các bạn làm theo hướng dẫn sau đây :
Các bạn vào Trang chủ >> Tin tức. ở mục này có các bài viết kỹ thuật thuộc các lĩnh vực khác nhau các bạn có thể lựa chọn lĩnh vực mà mình quan tâm để đọc nhé !!!
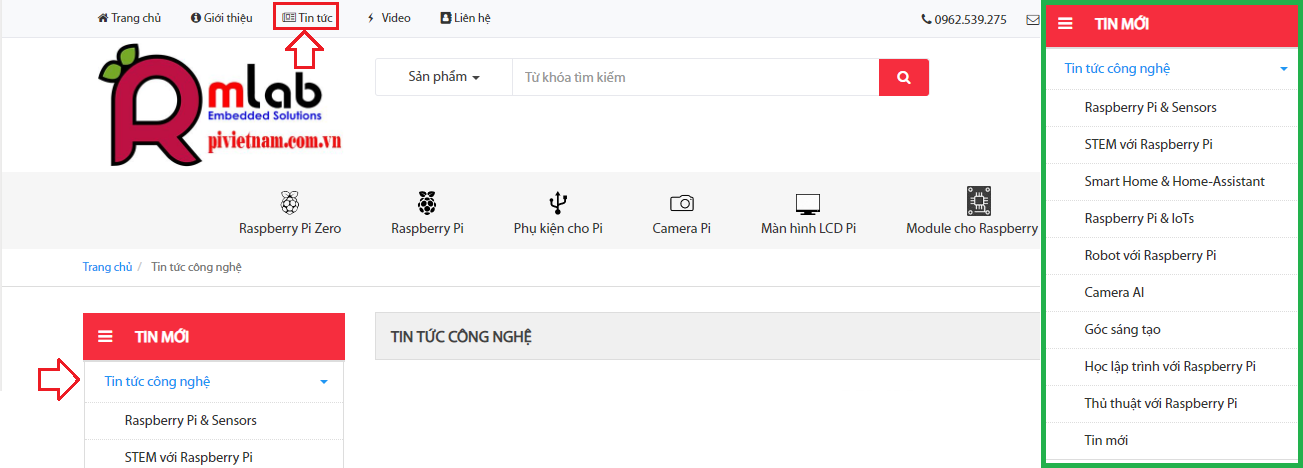
Các bạn cũng có thế kéo xuống cuối trang để xem những tin tức công nghệ mới nhất.